

Der Pncconf Wizard bietet grundsätzlich die Möglichkeit Maschinen einzurichten die mit Mesa IO Karten betrieben werden. Das können sowohl Maschinen mit Schrittmotor (über 7i76) wie auch Servo Antrieben sein.
Wichtig hierbei ist, das Maschinen mit viel Peripherie mit dem Wizard immer nur teilweise eingerichtet werden können. Der Grund hierfür ist schlicht das komplexe Zusammenspiel und die hohe Vielfalt an Methoden mit der die Peripherie genutzt wird.
Darüber hinaus muss hier genau geschaut werden welche Kartenkombination verwendet wird, da bisher nur ausgewählte Kombinationen konfigurierbar sind.
Der Wizard kann einige Schritte der Einrichtung durch die gelungene grafische Oberfläche deutlich beschleunigen, anders als beim Stepconf Wizard kommt man jedoch nicht um die HAL Ebene und die INI Datei umzu. Wobei HAL und die INI aber mit etwas Übung und den richtigen Tipps ;-) schnell beherrschbar sind.
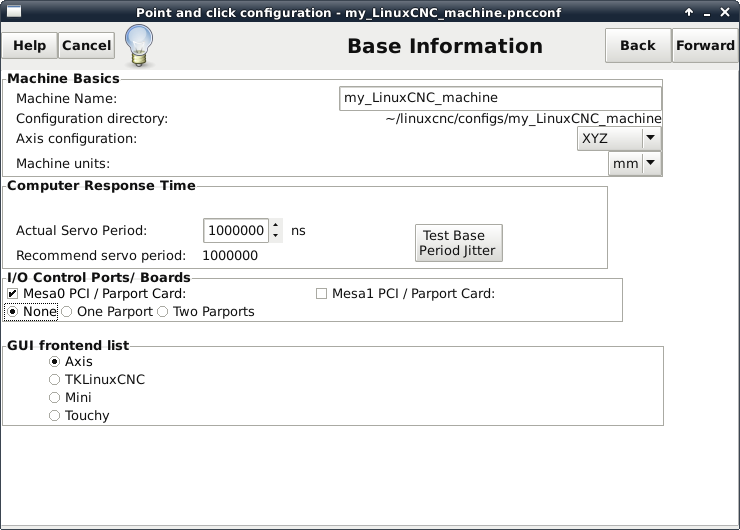
Die Machine Basics sollten selbsterklärend sein, während die Servo Period schon eher Fragen aufwirft. Gefragt wird hier nach dem Intervall in dem Prozesse wie die Positionsregelung aktualisiert werden sollen.
Anders als bei der Base Period von Schrittmotor Konfigurationen kann die Servo Period hoch angesetzt werden, da zeitkritische Prozesse automatisch von den Mesakarten übernommen werden.
Ein Wert von 1000000ns (1ms) sollte hier bei den meisten PC nicht zu Problemen führen, darüber hinaus sollte jedoch mit dem Test Base Period Jitter Button geprüft werden ob der PC Grundsätzlich für seine neue Aufgabe geeignet ist.
Es gelten dabei die Grenzwerte des Latency Tests.
LinuxCNC bietet die Möglichkeiten gänzlich unterschiedliche Benutzeroberflächen bzw. frontends zu wählen. Mehr dazu erfahren Sie in der GUIs Rubrik.
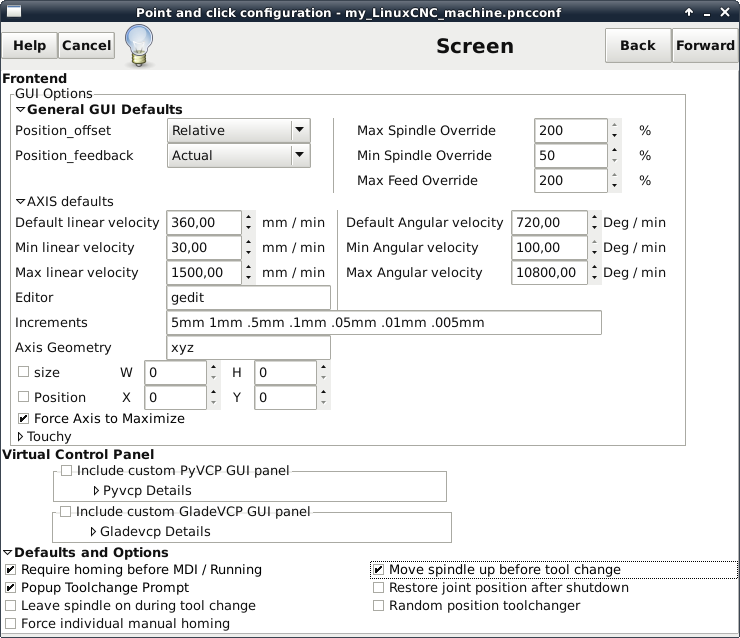
Im Screen Tab des Wizard können Einstellungen gewählt werden die das Erscheinungsbild und Bedienelemente von LinuxCNC beeinflussen.
Für lineare/ rotierende Achsen und die Spindel sind in der Benutzeroberfläche Schieberegler vorhanden deren Grenz- und Startwerte (default) in den GUI Options gewählt werden können.
Mit den Increments können feste Schrittweiten für das manuelle verfahren der Achsen fest gelegt werden.
Für die Einbindung von eigenen grafischen Elementen können sogenannte Pyvcp oder Gladevcp Panels erstellt und ausgewählt werden. Für die vollständige Einbundung der Panels müssen weiter Schritte auf der HAL Ebene ausgeführt werden.
Alle Einstellungen die hier aufgeführt werden (und mehr) können später auch in der INI Datei geändert werden.
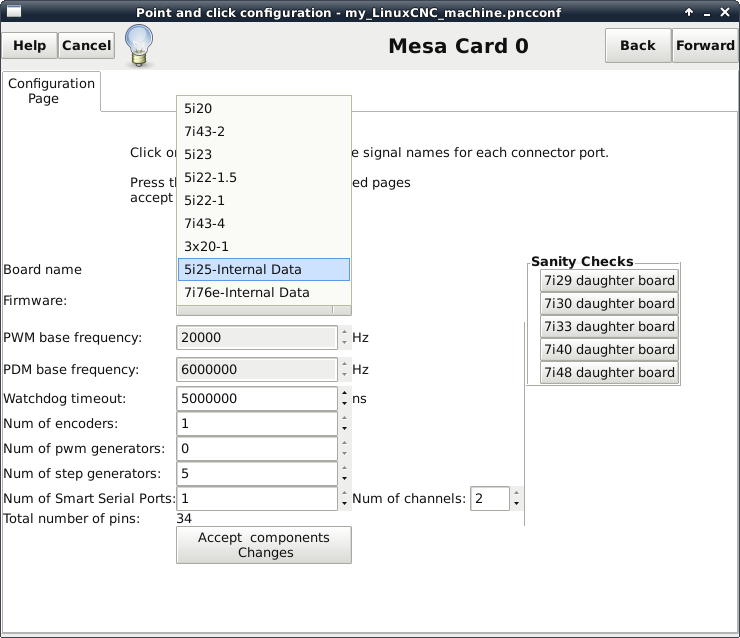
Im Mesa Card 0 / 1 Tab können die verwendeten Karten und deren Konfiguration gewählt werden.
Der Watchdog (Wachhund) ist eine Überwachungsfunktion die regelmäßig "Streicheleinheiten" vom PC bekommt. Bleibt das "Streicheln" aus wird "gebissen" und die Ausgänge der Karte zurückgesetzt. Im Falle eines Absturzes des PC kann so (hoffentlich) das Schlimmste verhindert werden.
Die Anzahl der Encoder, PWM und Step Generators kann in Abhängigkeit der Karte frei gewählt werden.
Mesakarten werden in PC Karten (FPGA Cards) und weiterführende Karten (Daughter Cards) unterteilt welche mit den FPGA Cards verbunden sind.
Die Anzahl der Smart Serial Ports hängt in erster Linie von der Anzahl der Daugter Cards ab, die an eine FPGA Card angeschlossen sind. Die Anzahl der Channels muss in der Regel nicht geändert werden.
Mit eine Klick auf den Accept components Changes Button werden der aktuellen Ansicht weitere Tabs hinzugefügt in denen Ein- und Ausgäng einer Funtktion zugeordnet werden können.
Und auch hier nochmal der Hinweis: Die 6i25 wird intern als 5i25 bezeichnet und kann dem zu Folge auch über den Wizard konfiguriert werden.
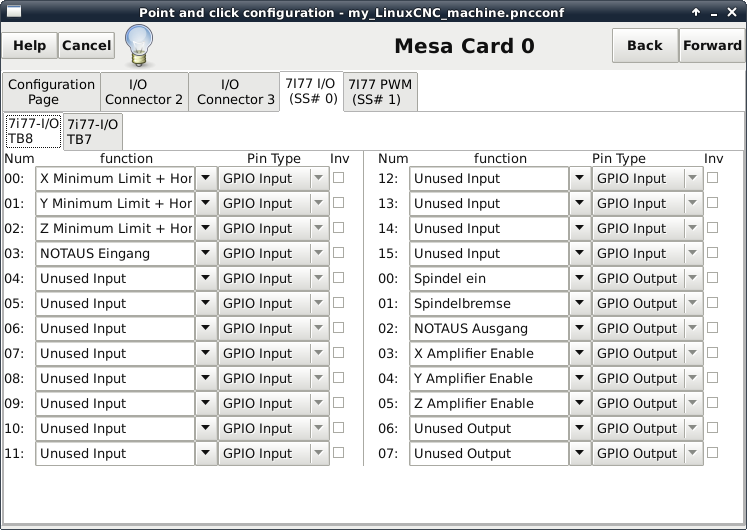
Jeder neue Tab entspricht einer Schraubklemm-Leiste auf der gewählten Karte.
LinuxCNC kann grundlegend JEDE Peripherie einer Maschine steuern, auch wenn diese nicht in den Dropdown Menüs aufgeführt ist. Um weitere Hardware zu steuern kann z.B. die HAL Ebene verwendet werden.
Im PWM Tab können die analog Ausgänge zugeordnet werden mit denen Servo Endstufen gesteuert werden.
Die Zuordnung von Encoder ist in dem Fall Pflicht und kann bei der 7i77 im I/O Connector 3 Tab gewählt werden. Dabei wird hier nicht nur ein Pin Zugeordnet sondern alle Pins eines Encoders.
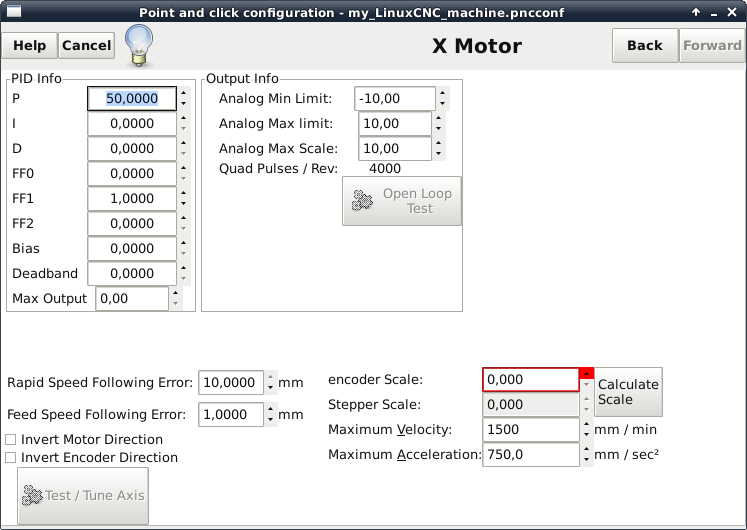
Im Motor Tab können die Regelparameter des PID Regler der Achse eingestellt und getestet werden.
Wichtig: Servo Antriebe die im kW Leistungsbereich arbeiten sind kein SPEILZEUG sie können Aggregate mit mehreren 100kg Gewicht mit einem "Knall" auf mehrere Meter pro Sekunde beschleunigen !!! Was unweigerlich zu Schäden an Mensch und Maschine führt wir Empfehlen daher vor ersten Versuchen die nötigen Infos einzuholen --> PID Regler.
Das finden der richtigen PID Werte ist immer ein Kompromiss zwischen Geschwindigkeit und Präzision und kann daher ein zeitintensiver Prozess sein. Mit unserer Anleitung zur Einrichtung von PID Reglern finden sie die Werte mit System in Windeseile.
Wer diesen Prozess auf später verschieben möchte sollte die PID und FFx Werte hier auf 0 setzen.
Das ausfüllen des encoder scale Wertes ist Pflicht für die folgenden Schritte.
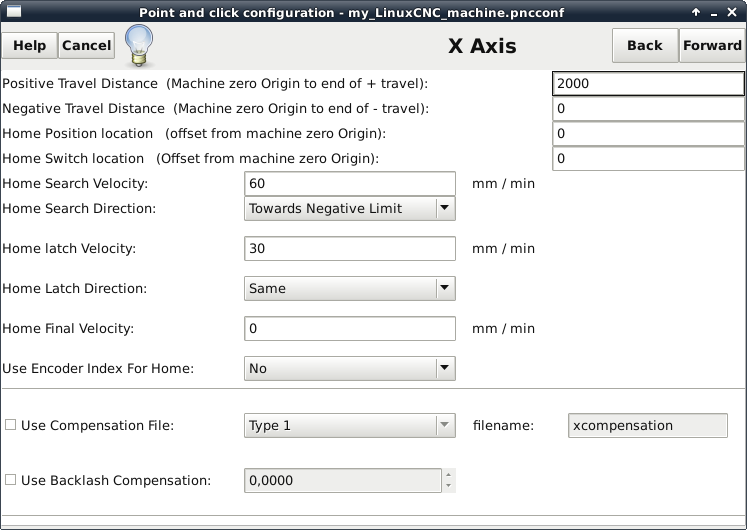
In diesem Tab können der Arbeitsbereich (Travel Distance) und Parameter für die Referenzfahrt (Home ...) definiert werden.
Die Home Position meint hier die Position die nach einer Referenzfahrt angefahren werden soll während bei Home Switch die tatsächliche Position des Referenzschalters angegeben wird.
Die Search und Latch Velocity gibt an mit welcher Geschwindigkeit der Referenzschalter angefahren und wieder verlassen wird. Der Hintergrund hierzu ist der, dass die Referenzfahrt einerseits schnell und andererseits präzise ablaufen soll.
Daher wird der Referenzschalter normalerweise so schnell wie es der Bremsweg zulässt angefahren und relativ langsam wieder verlassen.
Manche Encoder besitzen einen Z Anschluss der 1 x pro Umdrehung einen zusätzlichen Impuls ausgibt. Encoder Index nutzt diesen Impuls statt des Schaltpunktes des Referenzschalters für die Ermittlung der Referenzposition. Sinnvoll ist das nur da wo unpräzise Schaltpunkte zu erwarten sind, was aber selten der Fall ist.
Die Compensation (Kompensation der Position) oder Backlash (Zahnradspiel) Option sollten letzte Mittel für die Gnenauigkeit sein und deuten auf mechanisches Spiel hin, was im Idealfall auch auf mechanischer Seite behoben werden sollte.
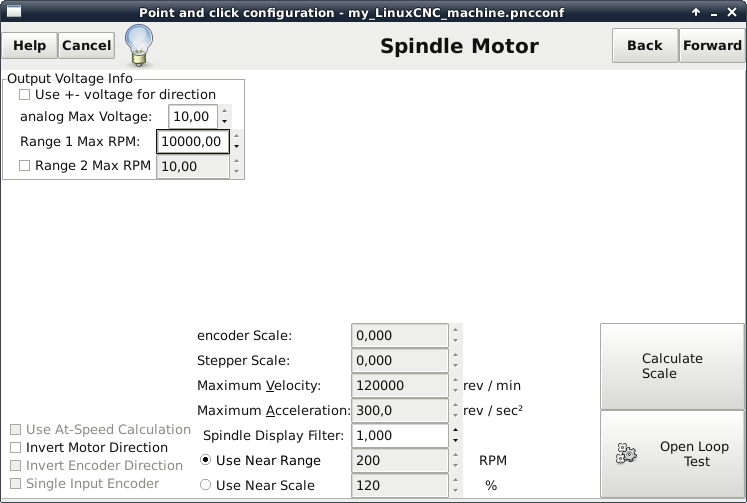
Frässpindel von größeren Maschinen werden oft über einen Frequenzumrichter gesteuert um die Drehzahl zu beeinflussen. Gebräuchlich ist hier ein Spannung von 0-10V und eine Richtungsumkehr über Schütze.
Die Max Voltage Spannung sollte als Resultat die bei Max RPM angegebenen Umdrehungen zur Folge haben. Das Verhältnis der Zahlen wird dann von Linux für die Drehzahlsteuerung genutzt, so dass für eine Drehzahl von 5000 RPM beispielsweise 5V ausgegeben werden.
Auch Spindeln können mit Encodern versehen sein, was z.B. für bestimmte Werkzeugwechsler von Bedeutung ist oder für Spindel Synchrone Bewegungen welche beim Gewindebohren nötig sind.